ROS MCP Server 🧠⇄🤖


ROS-MCP-Server connects large language models (such as Claude, GPT, and Gemini) to robots, enabling bidirectional communication with no changes to existing robot source code.
Why ROS-MCP?
- No robot source code changes → just add the
rosbridgenode to your existing ROS setup. - True two-way communication → LLMs can both control robots and observe everything happening on the Robot.
- Full context → publish & subscribe to topics, call services & actions, set parameters, read sensor data, and monitor robot state in real time.
- Deep ROS understanding → guides the LLM to discover available topics, services, actions, and their types (including custom ones) — enabling it to use them with the right syntax without manual configuration.
- Works with any MCP client → built on the open MCP standard, supporting Claude Code, Codex CLI, Gemini CLI, Claude Desktop, ChatGPT, Cursor, and more.
- Works across ROS versions → compatible across ROS 2 (Jazzy, Humble, and others) and ROS 1 distros.
🎥 Examples in Action
🖥️ Example - Controlling the MOCA mobile manipulator in NVIDIA Isaac Sim
Commands are entered into Claude Desktop, which uses the MCP server to control the simulated robot.
🐕 Example - Controlling Unitree Go2 with natural language (video)
The MCP server enables Claude to interpret images from the robot's cameras, and then command the robot based on human natural language commands.
🏭 Example - Debugging an industrial robot (Video)
- Connecting to an industrial robot enables the LLM to browse all ROS topics and services to assess the robot state.
- With no predefined context, the MCP server enables the LLM to query details about custom topic and service types and their syntax (00:28).
- Using only natural language, the operator calls the custom services to test and debug the robot (01:42).
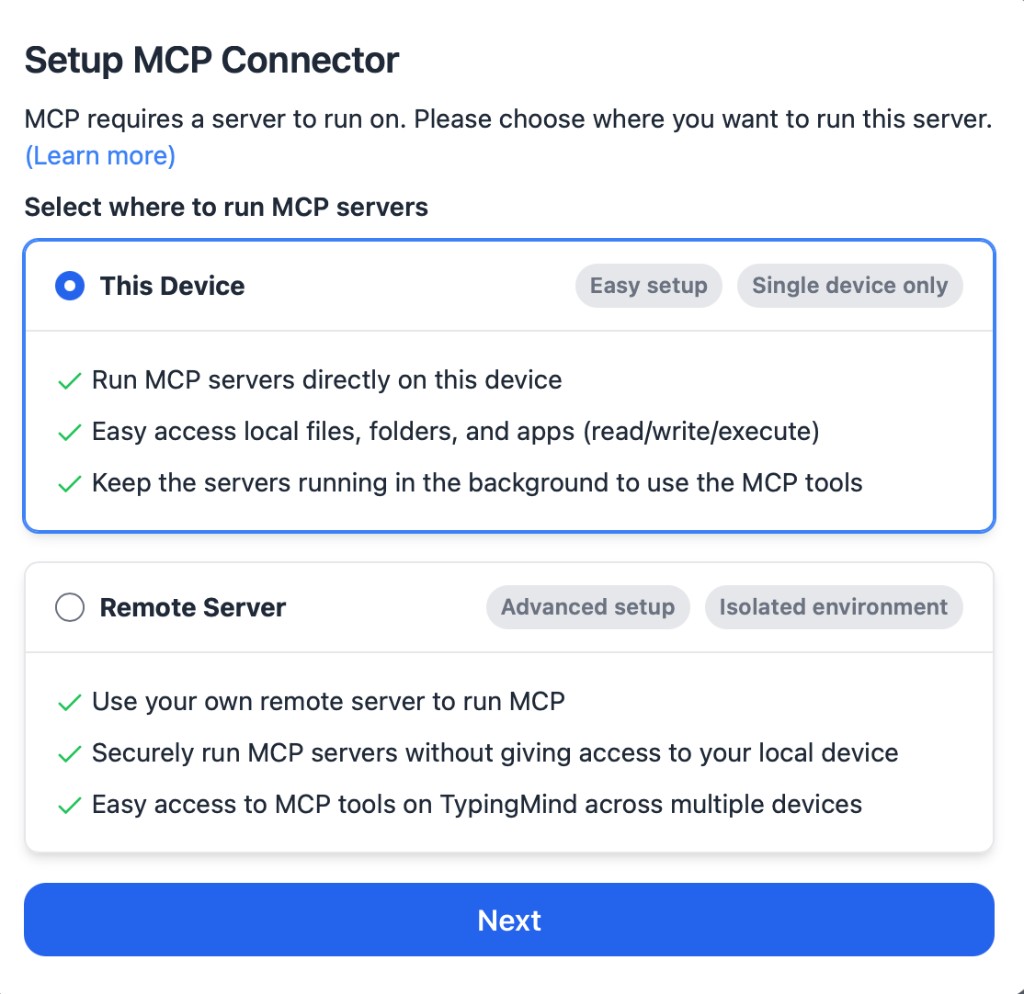
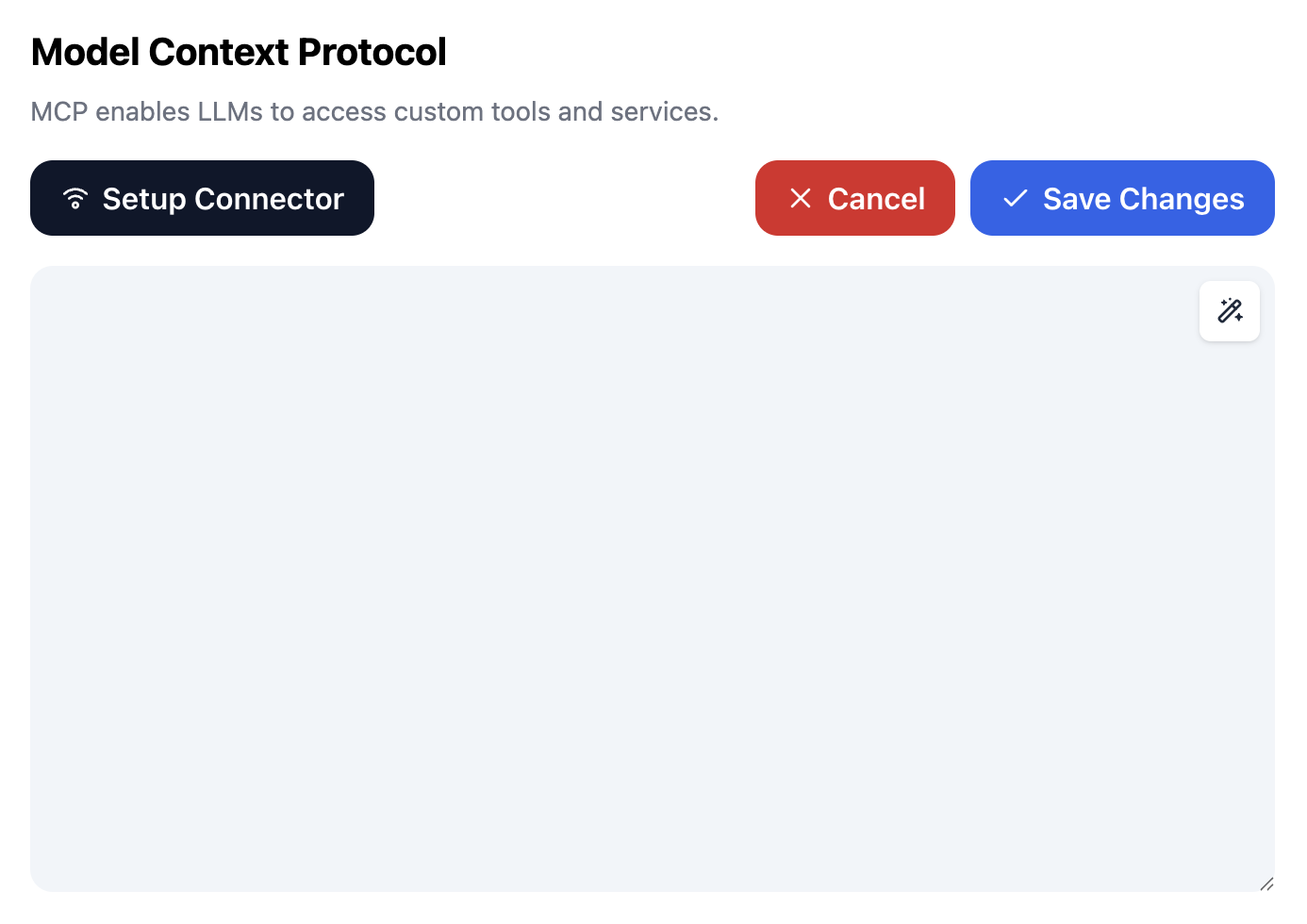
🛠 Getting Started
Follow the installation guide to get started.
ROS-MCP works with Claude Code, Codex CLI, Gemini CLI, Claude Desktop, ChatGPT, Cursor, or any MCP-compatible client.
📚 More Examples & Tutorials
Browse our examples to see the server in action.
We welcome community PRs with new examples and integrations!
🤝 Contributing
We love contributions of all kinds:
- Bug fixes and documentation updates
- New features (e.g., Action support, permissions)
- Additional examples and tutorials
Check out the contributing guidelines and see issues tagged good first issue to get started.
📜 License
This project is licensed under the Apache License 2.0.